|
RobWorkProject
23.9.11-
|
|
RobWorkProject
23.9.11-
|
Plugin for visualization of assembly operations. More...
#include "ui_ATaskVisPlugin.h"#include <rw/core/PropertyMap.hpp>#include <rw/core/Ptr.hpp>#include <rws/RobWorkStudioPlugin.hpp>#include <boost/any.hpp>Classes | |
| class | ATaskVisPlugin |
| Plugin for visualization of assembly operations. More... | |
Namespaces | |
| rw | |
| Deprecated namespace since 16/4-2020 for this class. | |
| rw::models | |
| Workcell and device models. | |
| rwlibs | |
| Extension libraries for RobWork. | |
| rwlibs::assembly | |
| Assembly strategies and task & result formats for assembly operations. | |
| rwlibs::opengl | |
| OpenGL drawing of workcells and geometries. | |
| rwslibs | |
| RobWorkStudio extension libraries. | |
Plugin for visualization of assembly operations.
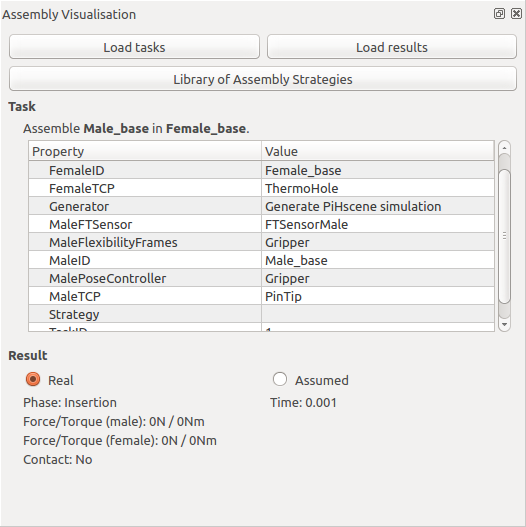
This plugin works best when used together with the rws::PlayBack plugin but can be compiled and used independently. When a workcell is loaded, the assembly task definition and results can be loaded in the plugin. If the result includes trajectory information, this can be shown with the playback plugin. The information under the result section, will be updated based on the time step chosen in the playback plugin. This plugin will also add additional renders to the RobWorkStudio scene, for rendering of contact and force/torque information stored in the assembly task and result.
It is possible to show a library of assembly strategies with the StrategyLibraryDialog. This dialog will also help set up a new assembly task definition if needed.
To use the plugin, create a RobWorkStudio.ini file in the RobWorkStudio/bin/debug folder with the following content (for debug build):